|
SAP-assembly line integration
Developed a contextual extraction system to understand the generated SAP error codes and relay the information to the conveyor system of the assembly line using a custom built communication interface. Observed improved traceability of the assemblies produced on the line. |

|
Vision based burr detection for robotic fettling process
Developed a vision based burr detection system which alerts the operator if the burr size crosses a predefined threshold value. This prevents any further damage to the abrasive cutter setup. |
|
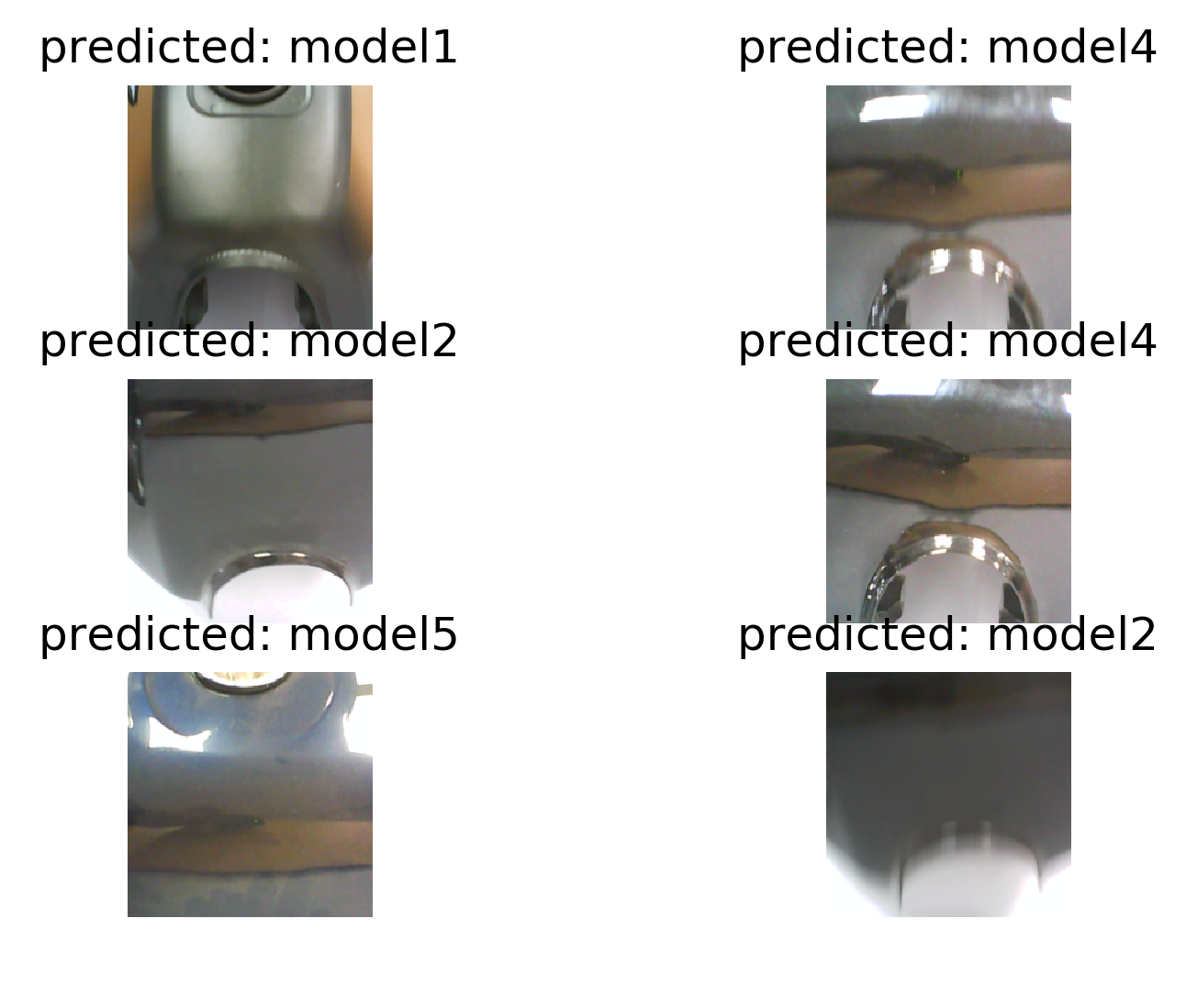
Vision based petrol tank model identification system
Developed an end-to-end vision based flexible model identification system. The state-of-the art resnet models from Pytorch are used for identification of the petrol tanks. The entire solution is developed using Flask, a Python based rapid web application deployment package. The model is made modular to allow for on-line addition of new tank designs. A faster inference time and a high frame rate are achieved by optimising the model through quantisation. |
|
Vision based weld classification system on the edge
Robust vision based classification system for different welding of mufflers. Developed an in-house low cost deep learning based machine vision solution using an edge device and a webcamera. Pytorch's mobilenet_v2 improves the frame rate at the cost of classification accuracy between the components when implemented on a resource constraint edge devices. Inference of the serialised model using torch library on C++ further improves the frame rate. |
|
Accessible topology optimisation
Implementation of the 88 line Matlab function "top88" in C++ using the Eigen library. |
|
Dual Quaternion Control
This project aims to explore the control of a manipulator with dual quaternion representation. Also studies the effects of choice of error to be controlled and its implication on the physical robot. |
|
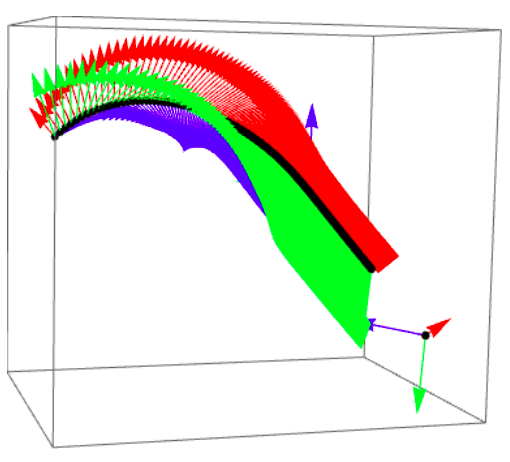
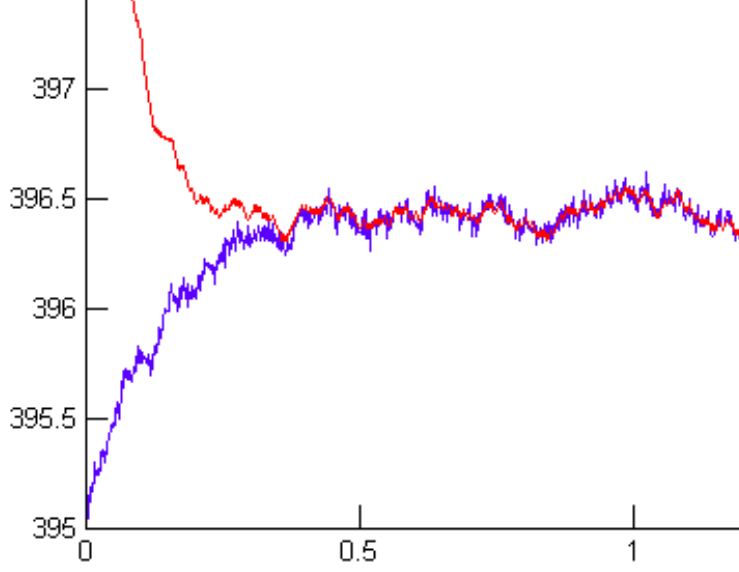
The Rising Camel Problem: Trajectory optimisation of parallel manipulators
Considering a quadruped robot in its quadruple stance phase as a parallel manipulator, we attempt to solve the energy-optimal control from sitting to a standing posture, also known as the rising camel problem. The idea of powerlifting is also explored. |
|
Kalman Filter Implementation
Implementation of an Extended Kalman Filter (EKF) on the data obtained from a non-linear chemical plant model. |
|
Parametric Study of Energy Optimal Control of a 2-R Manipulator
Implementation of time and energy optimal control on a 2-R planar manipulator and study the effects of geometric and inertial parameters on the control law. |
|
Design of a 5-bar parallel manipulator
Optimal design of a 5-bar parallel manipulator with respect to the Global Conditioning Index (GCI), Measure of Manipulability (MoM) and maximisation of the Safe Working Zone (SWZ) using NSGA-II |

|
Cart-Pole Problem Revisited: Trajectory Optimisation and more
A compilation of a few methods to control the cart-pole system and answer some questions on the way. |
|
Boid simulation in C++ and OpenGL
Simulating the naturally emergent flocking behaviour as proposed by Craig Reynolds in C++ using OpenGL. |
|
Simulating the game of life in C++
The game of life is an example of how complex behaviour can emerge from a simple set of rules. |
|
Dzhanibekov effect: Simulations in Fortran vs C++
The idea of this tutorial is (1) To simulate the Dzhanibekov effect (2) Compare the speed and accuracy of simulation in C++ and Fortran. |
|
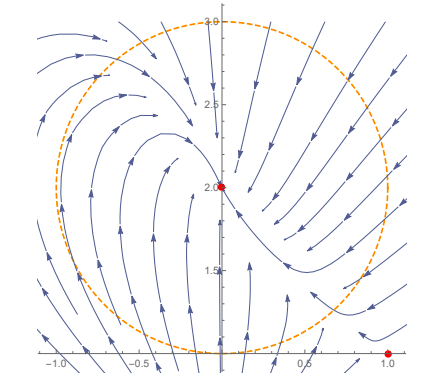
Index Theorems
Index theorems gives us a qualitative way to understand the vector field of a dynamical system, i.e., to know if there is a possibility of a closed orbit or to know what type of fixed points are possible within a curve etc. |
|
Flexible rotating body simulation
Simulation of the Lagrangian formulation of a flexible rotating beam modeled using Finite Element Method (FEM). |