|
I am a PhD student at TU Munich, thinking about ways to represent and co-optimise morphology and controllers of robotic systems and their implications on realising physical robots. I work as a research assistant at the Robot Systems Forschungsgruppe at LPL. I completed a short stint at the Multi-robot Systems Lab at Stanford , where we explored the ideas of diffusion policies and their combination with Gaussian splatting representation, serving as a simulatable digital twin-based surrogate for real-world data. I spent some time at the Artificial and Mechanical Intelligence Research Line at the Italian Institute of Technology, where I worked on methods to improve the robustness of humanoid walking by looking at the combined locomotion controller and joint actuation space. I previously worked as an electrical engineer in the Robotics and Automation team of Bajaj Auto Ltd, the largest three-wheeler and the third largest two-wheeler manufacturer in the world. We developed edge-based vision systems for low-cost robotic special-purpose machines. Earlier, I graduated from IIT Madras and was a member of the Robotics Lab, advised by Prof. Sandipan Bandyopadhyay, where I worked on the design, analysis and control of parallel robots. Email / Github / Google Scholar / LinkedIn / CV |
Research
|
In progresssim-to-real, 2025 |
|
In progresscfree, 2025 |
|
In progressAkhil Sathuluri, Gadiel Sznaier Camps Advisor: Prof. Mac Schwager Collaborators: MSL, Stanford Research exchange, 2025 code / |
|
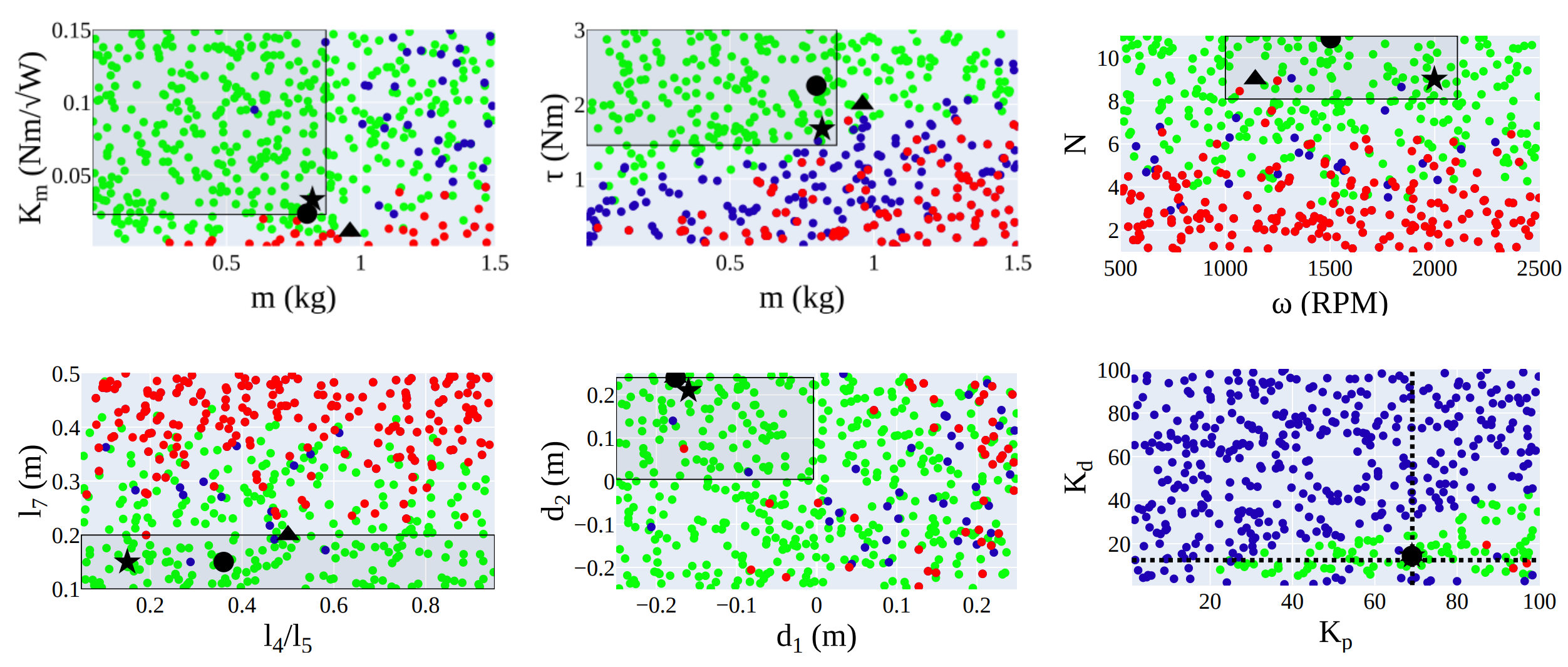
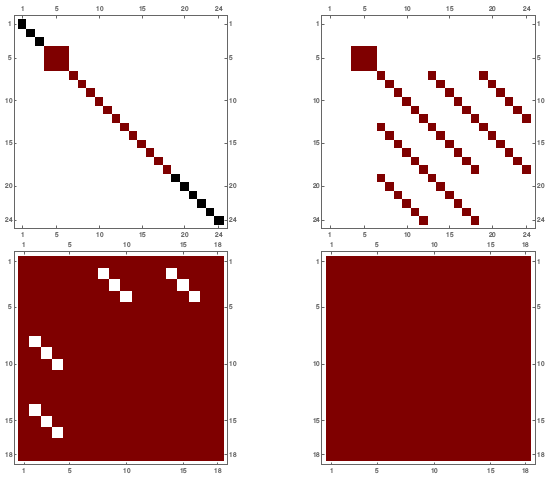
Co-design optimisation of a family of robots with shared componentsAkhil Sathuluri, Michael Otto, Karsten Stahl, Birgit Vogel-Heuser, Markus Zimmermann Collaborators: FZG, AIS 16th World Congress on Structural and Multidisciplinary Optimization (WCSMO 2025), 2025 code / |
|
Maximising Tolerance to Disturbances via Combined Control-Actuation Optimisation for Robust Humanoid Robot WalkingAkhil Sathuluri, Carlotta Sartore, Silvio Traversaro, Markus Zimmermann, Daniele Pucci Collaborators: Artificial and Mechanical Intelligence Research Line, IIT, Genova IEEE Robotics and Automation Letters, 2025 paper / code / |
|
Modeling and control of a teleoperation system for a small-scale In-Vessel Articulated Robot (IVAR)Akhil Sathuluri, Maximilian Amm and colleagues at TUM Collaborators: Max Planck Institute for Plasma Physics Development project, 2024 |
|
A Multidisciplinary Optimization Approach for Resolving the Vicious Cycle between Morphology and Control of RobotsAkhil Sathuluri, Markus Zimmermann 15th World Congress on Structural and Multidisciplinary Optimization (WCSMO 2025), 2023 |

|
Computational Systems Design of Low-Cost Lightweight RobotsAkhil Sathuluri, Anand Vazhapilli Sureshbabu, Jintin Frank, Maximilian Amm, Markus Zimmermann Robotics 2023, 2023 paper / code / |
|
Robust co-design of robots via cascaded optimisationAkhil Sathuluri, Anand Vazhapilli Sureshbabu, Markus Zimmermann International Conference on Robotics and Automation (ICRA 2023), London, 2023 paper / video / code / |
|
A systems design approach for the co-design of a humanoid robot armAkhil Sathuluri Presented at the Workshop on Development and Design Pipelines - From first ideas to well-functioning robots, 2022 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2022), 2022 preprint / code / |
|
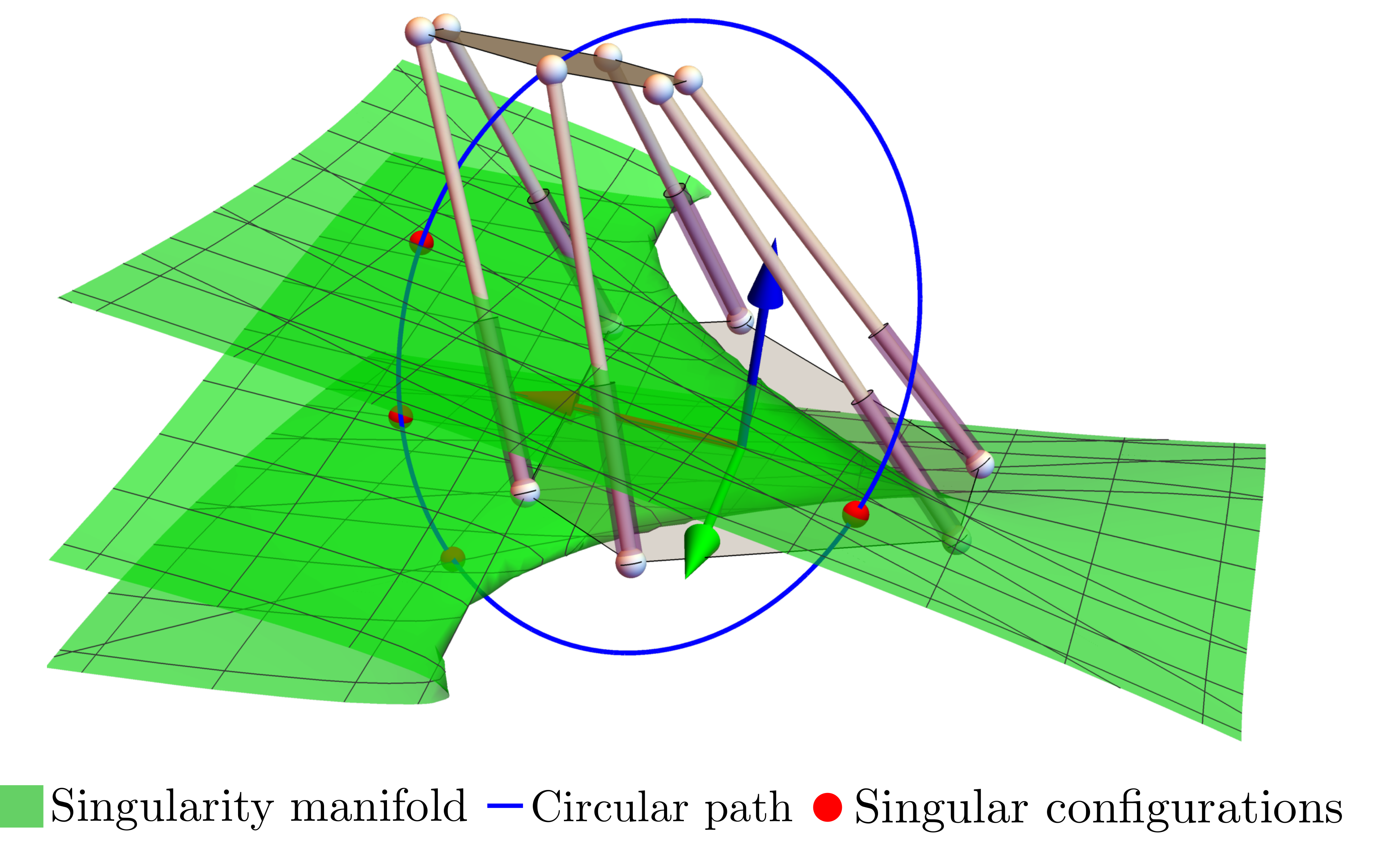
Extended-configuration-space modelling: mapping to reduced order models and real-time simulation of Lagrangian dynamics and control of parallel manipulatorsAkhil Sathuluri Advisor: Sandipan Bandyopadhyay Dual Degree Report, 2020 code / |
|
A Study on the Lagrangian Formulation of Dynamics with Applications to Control of Parallel ManipulatorsAkhil Sathuluri Advisor: Sandipan Bandyopadhyay Dual Degree Report, 2019 report / code / slides / |
|
Root-tracking methods and their applications in simulationsAkhil Sathuluri Advisor: Sandipan Bandyopadhyay Dual Degree Report, 2019 code / |
|
MaMiC: Macro and Micro Curriculum for Robotic Reinforcement LearningManan Tomar, Akhil Sathuluri, Balaraman Ravindran Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, 2018 paper / arxiv / |
|
Sim-to-real transfer of RL policies with industrial robotsAkhil Sathuluri, Manan Tomar Industrial Research, 2018 code / |
|
MagNex — Expendable robotic surgical tooltipKarthik Chandrasekaran, Akhil Sathuluri, Asokan Thondiyath IEEE International Conference on Robotics and Automation (ICRA), 2017 paper / |